ROBOTS POUR LE VIEILLISSEMENT
Le projet a trois types d'applications : mobilité, vie quotidienne et socialisation.Ces applications sont développées sur deux robots : Astro, basé sur la plate-forme mobile SCITOS G5 qui convient aux tâches lourdes, et Buddy, un robot de petite taille conçu comme un compagnon du domicile.ASTRO

Caractéristiques :
Astro est une plate-forme robotique intelligente d’assistance dédiée à la mobilité et à l’interaction utilisateur. Il a été conçu pour se déplacer à l’intérieur d’environnements domestiques et résidentiels non structurés. C’est un gros robot, assez solide pour devenir un marcheur intelligent. Il peut identifier l’emplacement de l’utilisateur dans le domicile et interagir avec lui en utilisant le langage oral, un écran tactile et un système visuel LED. Sur son dos, le robot dispose d’un support physique adaptable pour aider les personnes à se lever.
Objectif :
Les travaux sur ASTRO viseront à améliorer la capacité de ses marchettes intelligentes et d’autres services pour répondre aux exigences de l’application.
Défis :
Les marcheurs intelligents doivent tenir compte des questions de maniabilité, telles que la sécurité, le confort et la simplicité d’utilisation de l’appareil. A cet effet, des recherches orientées sont menées afin d’améliorer son état actuel pour servir de support à la marche.
Tout d’abord, changer le mode de saisie actuel basé sur les boutons de la poignée avec de nouveaux capteurs plus intuitifs, comme les capteurs de pression et de force, afin de comprendre l’intention des utilisateurs.
Par ailleurs, des recherches sur le contrôle partagé homme-robot sont nécessaires pour développer un contrôle réactif capable de traiter les différences entre utilisateurs multiples. De plus, des stratégies d’interaction physique entre robots humains (pHRI) sont étudiées pour fournir des informations aux utilisateurs sur ses réactions autonomes, par exemple dans le cas d’arrêt pour éviter une collision ou d’écart léger contraire aux données des utilisateurs afin d’éviter un obstacle dans l’environnement.
En ce qui concerne les questions de navigation de proximité (précision/sécurité), le robot Astro est une plate-forme de recherche prototype et, par conséquent, toutes les questions de la norme ISO 13482 (Robots et dispositifs robotiques) ne sont pas remplies. Cependant, comme il s’agit d’une plate-forme commerciale, plusieurs spécifications sont déjà résolues, comme la présence de pare-chocs et de boutons d’urgence ou un centre de gravité bas.
APPLICATION POUR ASTRO
BUDDY
Caractéristiques :
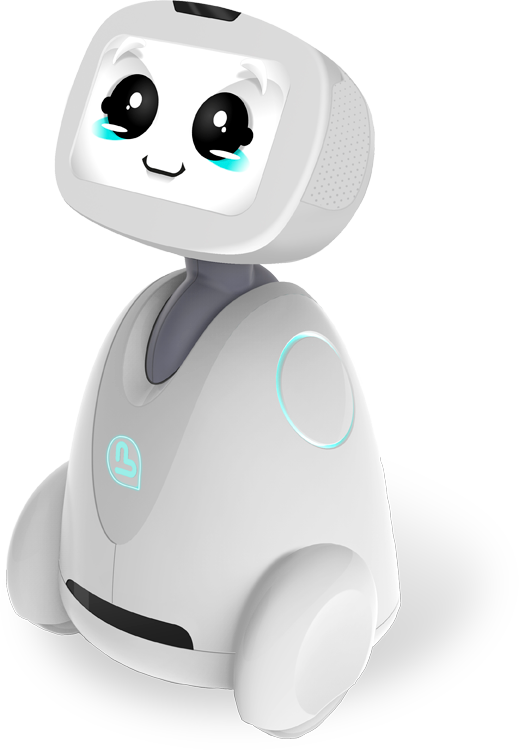
Buddy est physiquement le contraire d’Astro. Il s’agit d’un robot de petite taille et conçu comme un compagnon de maison. Il ne peut pas être un support physique pour la marche. Les outils de développement (SDK) sont basés sur les technologies Open-Source telles que Unity3D (jeux vidéo) et OpenCV (visant la vision par ordinateur en temps réel) pour développer des applications avancées pour le robot.
Objectif :
Les travaux sur Buddy dans le projet viseront à intégrer de nouvelles applications et potentiellement du nouveau matériel afin de répondre aux exigences des cas d’utilisation dans une approche différente de celle du robot Astro. Le robot Buddy peut être connecté au réseau domestique et Internet pour accomplir ses tâches.
Défis :
Dans l’ensemble, le défi consistera à concevoir de nouvelles applications intelligentes en utilisant le processus de co-création agile. En ce qui concerne la navigation de proximité (précision/sécurité), Buddy est un robot léger destiné au marché grand public et donc conforme aux normes, en particulier à l’ISO 13482.